Work I Completed
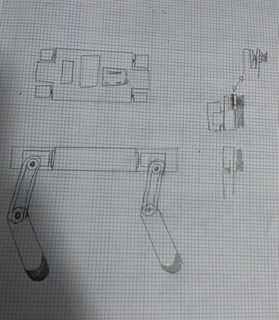
This week in Robotics I have been looking into designing the chassis of Winston Mk III. I have used this as an opportunity to write down all the components I am going to need, or at least what I think I will need, in order to know what to have room for on the chassis. I have also decided to dedicate this semester to controlled movement that uses IK, and to attempt to automate it next semester. For this, I plan to have a controller, likely using joysticks or potentiometers, and have them communicate to an Arduino Uno unit mounted to the robot. Ideally this communication would be wireless, however, it is not as high a priority as getting the movements working. The robot, in addition to the Arduino, will need room for a breadboard, and a servo rack, as each leg will have 3 servos. This is an additional servo compared to my current leg design, while I intend to keep the leg design the same, with the exception of making parts sturdier, I want to add a dimension of movement to them, allowing the dog to turn easier. This means that when I add the IK, I will need to control normal movement, as in forward, backward, and sideways movement, as well as having roll, pitch, and yaw. I also need to plan for next semester, making sure I include room to have a LiDAR sensor to be mounted on, and have somewhere for a raspberry pi in case I want to use it with something. My current design, although still in the early stages, has one major issue, that being the way the legs mount onto it. The design has cut outs where the legs will be, and, with the goal of having that extra dimension of movement, the legs need to be attached to the body by a motor. I haven’t looked into it yet, but what I fear is that the part of the motor that connects the leg and body will not be able to support the weight of the body. My assumption is that, if mounted well, then the leg should be able to support this weight, however, without research or testing, I am unable to determine for sure what the outcome will be. I intend to look more into this in the coming weeks, focussing more on the actual legs and body design in Fusion360, and getting printed parts to work with.
For the assignment, I need to produce a presentation about this robot. Currently, with the assessment being so far away, there is little information I can find about what I actually need to be presenting on, and whether I need a fully working dog by then. Hopefully, if all goes well, this should be achieved with plenty of time to dedicate to just the presentation component. I plan to talk to my teacher about what needs to be done for the presentation later on this week.
Reflection
I am happy to have made a good start on the design of the robot, having a rough yet full first rendition, likely to need only minor adjustments. I am also glad to have this done early, as I feel I will need more time on the 3D modelling aspect of it, as I am not as comfortable modelling on Fusion as I am with any other part of such a project. While this will slow down the process, it shouldn’t be enough to cause worry, especially as I have months to complete the project.